




芯片资讯
热点资讯
- 紫光展锐T310、T610、T618三款4G核心板有何不同?
- 和美精艺科创板IPO受理!主打存储芯片封装基板,募资8亿建设生产基地等
- 基于智能手机的miRNA多色荧光成像传感平台
- 电子电路元器件套装与原理图解析:芯片分销商模式如何赋能电子设计
- 小米史上最强机皇来了!将会与华为和iPhone正面硬刚
- 英伟达Grace-Hopper提供一个紧密集成的CPU + GPU解决方案
- 国产芯片龙头发力,兆易创新LPDDR4X即将量产
- 德州仪器(TI)代理商还剩哪些?从分散到集权的博弈,及艾睿受限后的破局之路
- 思瑞浦 TPT1043AQ CAN 收发器芯片:适配车载场景,性能可靠还省心
- 四大被动元器件厂商2025Q3最新营收-国巨/风华/三星电机/村田
- 发布日期:2024-01-09 11:45 点击次数:132 一. 简介
RK3588从入门到精通
开发板:ArmSoM-W3
Kernel:5.10.160
OS:Debian11
本⽂主要介绍在Rockchip平台下Camera相关代码配置,MIPI-CSI调试的通路解析
名词解释:
CSI ( Camera Serial Interface ):主机处理器与摄像头模块之间的高速串行接口
DSI ( Display Serial Interface ):主机处理器与显示模块之间的高速串行接口
ISP ( Image Signal Processor ): 即图像信号处理模块, 主要作用是对前端图像传感器输出的信号做后期处理,依赖于 ISP 才能在不同的光学条件下都能较好的还原现场细节。
VICAP( Video capture ):视频捕获单元
MIPI-DPHY :Rockchip芯片中符合MIPI-DPHY协议的控制器。
二. MIPI-CSI基础概念MIPI:移动产业处理器接口(Mobile Industry Processorinterface) 是MIPI联盟发起的为移动应用处理器制定的开放标准。
CSI: MIPI-CSI-2协议是MIPI联盟协议的子协议,专门针对摄像头芯片的接口而设计。
由于其高速,低功耗的特点,MIPI-CSI2协议极大的支持了高清摄像头领域的发展,CSI-2协议遵循的物理标准有两个,分别为C-PHY和D-PHY。
D-PHY与C-PHY区别: 从实用角度来看,主要是数据线和时钟线的区别,还有传输速率,C-PHY通过某些技术改良,使数据传输速度更快。
瑞芯微3588用的DPHY-v1.2 &&(D/C-PHY) DPHY-v2.0。
三. MIPI-CSI硬件配置RK3588 camera 资源硬件拥有2路DCPHY,2路DPHY,一路DVP,6路CSI HOST,一个vicap控制器,2个isp控制器。 其中2路DPHY可以分解成4x2lane的模式工作。
硬件通路框图如下:
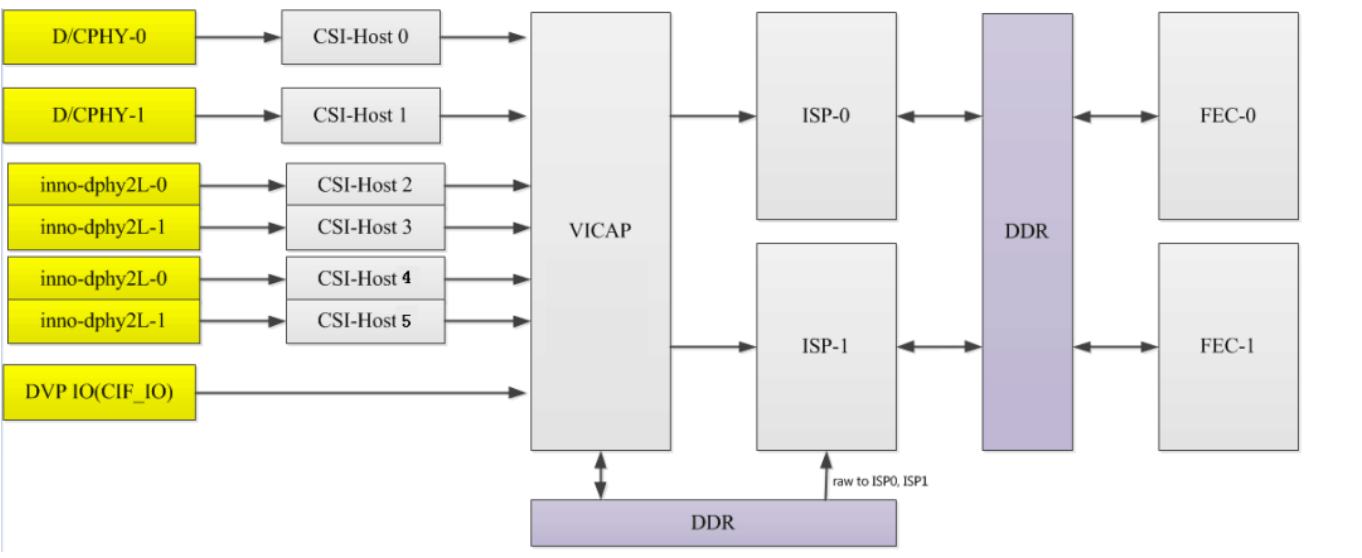 armsom-camera-channel
armsom-camera-channelMIPI-CSI资源介绍 :
TypeMax bandwidthNUMModeDPHY-v1.22.5Gbps x 4 lanes24lane or 2lane+2lane(D/C-PHY) DPHY-v2.0DPHY-v2.0: 2.5Gbps x 2lanes2DPHY-v2.0: 2laneCSI-HostFor MIPI D-PHY v1.2/D-PHY v2.0/C-PHY v1.162lane最大带宽是5G,分辨率可以达到8M30帧,4lane最大带宽达到10G。
三. MIPI CSI用法3.1 DPHYrk3588支持两个dcphy,节点名称分别为csi2_dcphy0/csi2_dcphy1。每个dcphy硬件支持RX/TX 同时使用,对于camera输入使用的是RX。支持DPHY/CPHY协议复用;需要注意的是同一个dcphy的TX/RX 只能同时使用DPHY或同时使用CPHY
rk3588支持2个dphy硬件,这里我们称之为dphy0_hw/dphy1_hw,两个dphy硬件都可以工作在full mode 和split mode两种模式下
Full Mode: 仅使用csi2_dphy0,csi2_dphy0与csi2_dphy1/csi2_dphy2互斥,不可同时使用;
data lane最大4 lanes;
最大速率2.5Gbps/lane;
Split Mode: 仅使用csi2_dphy1和csi2_dphy2, 与csi2_dphy0互斥,不可同时使用;
csi2_dphy1和csi2_dphy2可同时使用;
csi2_dphy1和csi2_dphy2各自的data lane最大是2 lanes;
csi2_dphy1对应物理dphy的lane0/lane1;
csi2_dphy2对应物理dphy的lane2/lane3;
最大速率2.5Gbps/lane;
3.2 多sensor支持硬件支持最多采集7路sensor:6mipi + 1dvp,多sensor软件通路如下:
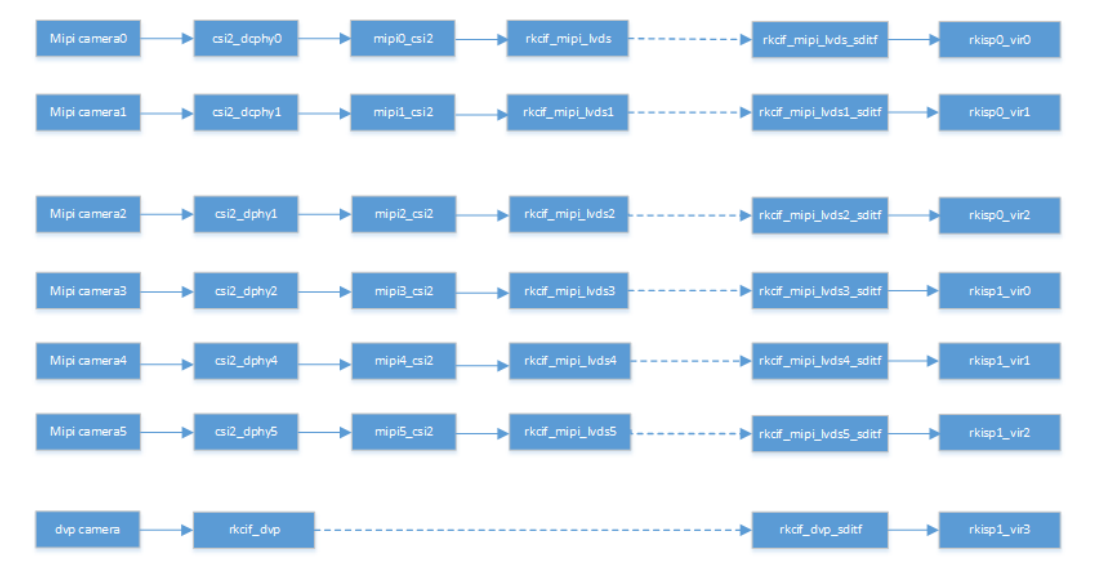 armsom-camera-connect四. camera相关配置4.1 Camera 软件驱动目录
armsom-camera-connect四. camera相关配置4.1 Camera 软件驱动目录Camera相关驱动文件如下:
|-- arch/arm/boot/dts DTS配置文件
|-- drivers/phy/rockchip
|-- phy-rockchip-mipi-rx.c mipi dphy驱动
|-- phy-rockchip-csi2-dphy-common.h
|-- phy-rockchip-csi2-dphy-hw.c
|-- phy-rockchip-csi2-dphy.c
|-- drivers/media
|-- platform/rockchip/cif RKCIF驱动
|-- platform/rockchip/isp RKISP驱动
|-- dev 包含 probe、异步注册、clock、pipeline、 iommu及media/v4l2 framework
|-- capture 包含 mp/sp/rawwr的配置及 vb2,帧中断处理
|-- dmarx 包含 rawrd的配置及 vb2,帧中断处理
|-- isp_params 3A相关参数设置
|-- isp_stats 3A相关统计
|-- isp_mipi_luma mipi数据亮度统计
|-- regs 寄存器相关的读写操作
|-- rkisp isp subdev和entity注册
|-- csi csi subdev和mipi配置
|-- bridge bridge subdev,isp和ispp交互桥梁
|-- platform/rockchip/ispp rkispp驱动
|-- dev 包含 probe、异步注册、clock、pipeline、 iommu及media/v4l2 framework
|-- stream 包含 4路video输出的配置及 vb2,帧中断处理
|-- rkispp ispp subdev和entity注册
|-- params TNR/NR/SHP/FEC/ORB参数设置
|-- stats ORB统计信息
|-- i2c
|-- imx415.c CIS(cmos image sensor)驱动
4.2 Sensor驱动开发移植Sensor 驱动位于 drivers/media/i2c 目录下,Sensor 驱动与 RKCIF 或者 RKISP1 驱动最大程度上独立,二者异步注册,在dts中由 remote-endpoint 声明 连接关系。
Sensor 驱动的开发移植概括为 5 个部分
1.按照 datasheet 编写上电时序,主要包括 vdd、reset、powerdown、clk 等
2.配置 sensor 的寄存器以输出所需的分辨率、格式
3.编写 struct v4l2_subdev_ops 所需要的回调函数,一般包括 set_fmt、get_fmt、s_stream、s_power
4.增加 v4l2 controller 用来设置如fps、exposure、gain、test pattern
5.编写 probe()函数,并添加 Media Control 及 Sub Device 初始化代码
Documentation/devicetree/bindings/media/i2c/下面有对驱动的Documentation可供参考,板级 dts 可以根据该文档快速配置。
在板级 dts 中,引用 Sensor 驱动,一般需要:
1.配置正确的 clk及io mux
2.根据原理图设置上电时序所需要的 regulator 及 gpio
3.增加 port 子节点,与 cif 或者 isp 建立连接
4.2.1 上电时序不同 Sensor 对上电时序要求不同,可能很大部分的 Sensor 对时序要求不严格,只要 mclk、vdd、reset 和 powerdown 状态是对的、就能正确进行 I2C 通讯并输出图片,而不用关心上电的先后顺序及延时, Sensor 厂家提供的 DataSheet 中,一般会有上电时序图,只需要按顺序配置即可。
__imx415_power_on() //控制上电时序部分
__imx415_power_off() //控制下电时序部分
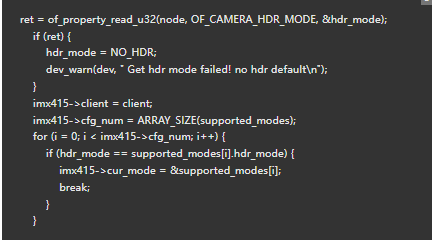
在probe()阶段会去尝试读取 chip id,如 imx415的 imx415_check_sensor_id,
ret = __imx415_power_on(imx415); if (ret) goto err_free_handler; ret = imx415_check_sensor_id(imx415, client); if (ret) goto err_power_off;
如果能够正确读取到chip id,一般就认为上电时序正确,Sensor 能够正常进行 i2c 通信
一般在imx415_check_sensor_id()中出现问题、按照以下方式排查
1.先将__imx415_power_off()注释掉
2.检查i2c从地址、i2c读函数
3.可以抓下i2c的波形
4.2.2 Sensor 初始化寄存器列表在imx415的驱动中, 亿配芯城 定义了struct imx415_mode supported_modes[],用来表示Sensor 支持的不同初始化 mode,即Sensor可以输出不同分辨率的图像、不同的fps等。Mode 可以包括如分辨率,Mbus Code,fps,寄存器初始化列表等。
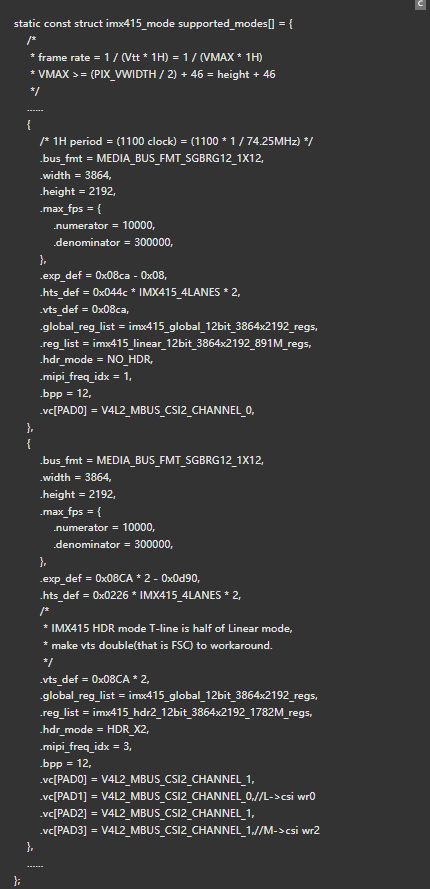
这里支持很多种imx415模组的分辨率配置,默认是3864x2192@30fp,查看下面代码可知会以一种分辨率来做为默认的配置:
适配新的分辨率需要替换新的初始化列表,例如imx415摄像头,仅支持30帧,但是需要提升到60帧。
sensor本身支持的最大mipi传输速率,每秒传输的数据量是width * height * 10bit * fps,这个也是有上限,不能无限制提高。 IMX415的DateSheet上写的就是支持3864x2192@30fps,要调整为60帧,需要厂家提供一组低分辨率的sensor配置,比如1080P@60fps,然后添加到struct imx415_mode supported_modes[]的.reg_list中,reg_list列表最后用了 REG_NULL 表示结束。
4.2.3 回调函数v4l2_subdev_ops 回调函数是 Sensor 驱动中逻辑控制的核心,包含丰富的接口给上层应用调用
static const struct v4l2_subdev_ops imx415_subdev_ops = { .core = &imx415_core_ops, .video = &imx415_video_ops, .pad = &imx415_pad_ops, };
部分成员函数:
open - Userspace通过在打开/dev/v4l-subdev?节点时,会调用到该.open()函数。
s_power - 包括power on和power off。在这里上电或者下电
enum_mbus_code - 用于枚举支持的媒体总线(Media Bus)格式代码。媒体总线是V4L2系统中用于描述图像格式的标准。这个函数可能会列出IMX415传感器支持的不同媒体总线格式代码。
enum_frame_size - 用于枚举传感器支持的不同帧尺寸(分辨率)。这个函数可能会返回一组可用的帧尺寸选项,供应用程序选择。
enum_frame_interval - 用于枚举传感器支持的不同帧间隔(帧速率)。它会返回可用的帧间隔选项,以供应用程序选择。
get_fmt - 用于获取当前传感器的图像格式。应用程序可以使用它来查询当前设置的图像格式。
set_fmt - 用于设置传感器的图像格式。应用程序可以使用它来配置所需的图像格式。
get_selection - 用于获取当前传感器的图像选择(ROI - Region of Interest)。这允许应用程序了解当前的感兴趣区域设置。
get_mbus_config - 用于获取媒体总线配置,包括数据总线宽度、时序等信息。
这些函数在V4L2子设备的驱动程序中起着关键的作用,允许应用程序配置和控制IMX415传感器,以捕获图像和视频数据。
4.3 DTS配置这里是单路Camera的dts配置说明,以imx415摄像头为例 。
案例场景:这里使用的是csi2_dphy0的单路camera配置:
链路配置: imx415 —> csi2_dphy0 —> mipi2_csi2 —> rkcif_mipi_lvds2—>rkcif_mipi_lvds2_sditf —>rkisp0_vir2
在这个通路下,会注册medio0和medio1这两个节点。
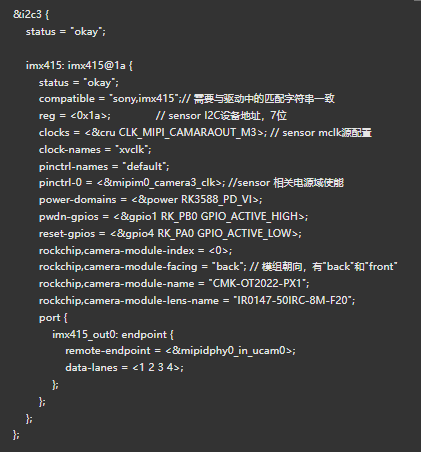
4.3.1 配置sensor端我们需要根据板子原理图的MIPI CSI接口找到sensor是挂在哪个I2C总线上,然后在对应的I2C节点配置camera节点,正确配置camera模组的I2C设备地址、引脚等属性。sensor对应驱动路径在kernel\drivers\media\i2c下面。 下面是imx415配置:
注意:
data-lanes必须指明具体使用的lane数,否则无法识别为mipi 类型;
module-index与iq文件中的moduleId相关,对应moduleId配置为m00,对应moduleId配置为m01,m是“module”的缩写,01是十进制数字;
module-name与module-lens-name命令与设备/etc/iqfiles中对应sensor的iq文件名后面相同。这里对应的Sensor iq文件是“imx415_CMK-OT2022-PX1_IR0147-50IRC-8M-F20.json”,注意大小写有区分
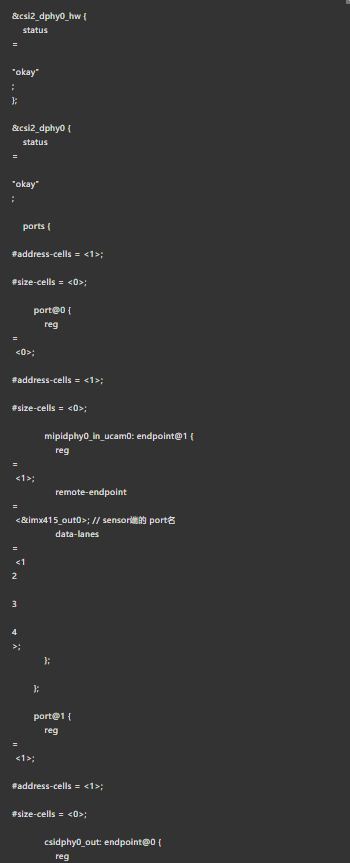
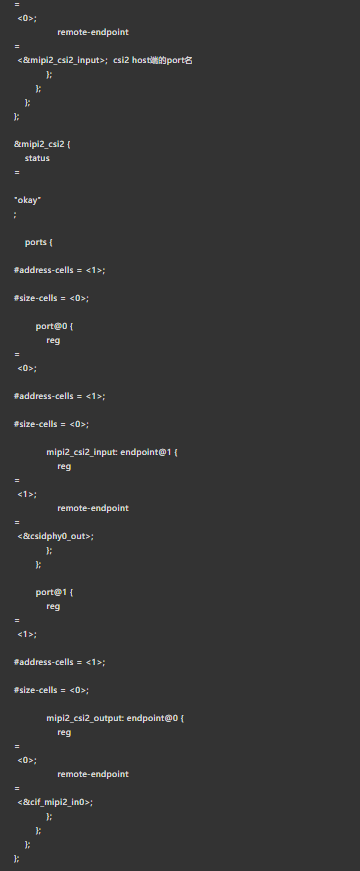
4.3.2 csi2_dphy0配置csi2_dphy0与csi2_dphy1/csi2_dphy2互斥,不可同时使用。另外需要使能csi2_dphy0_hw物理节点
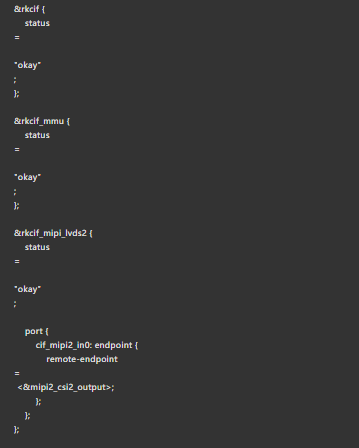 4.3.3 isp相关配置
4.3.3 isp相关配置&rkcif_mipi_lvds2_sditf { status = "okay"; port { mipi_lvds2_sditf: endpoint { remote-endpoint = ; }; }; }; &rkisp0 { status = "okay"; }; &isp0_mmu { status = "okay"; }; &rkisp0_vir0 { status = "okay"; port { #address-cells = ; #size-cells = ; isp0_vir0: endpoint@0 { reg = ; remote-endpoint = ; }; }; };
一个ISP可以接多个Sensor,但只能分时复用。通过配置dts,将多个Sensor链接到MIPI DPHY后,可通过media-ctl切换Sensor。
4.4 多摄像头配置上述是单目4lan摄像头的配置,DPHY处于Full Mode下,这里有一份DPHY处于Split Mode下,配置四个2lan摄像头的例子: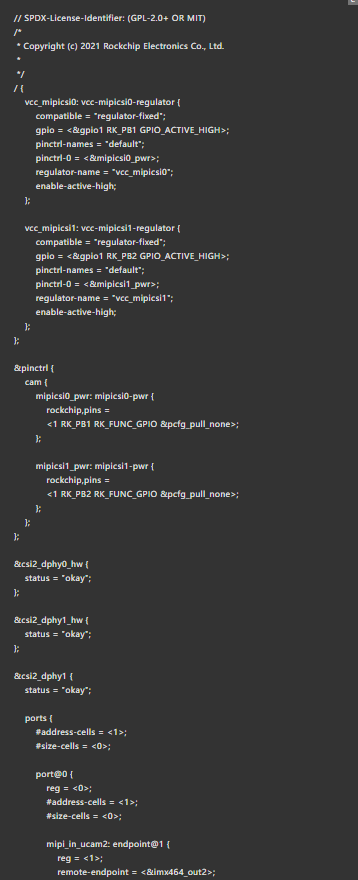
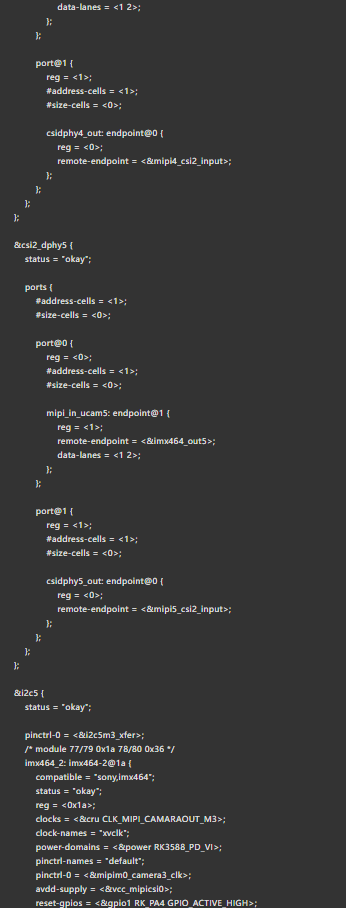
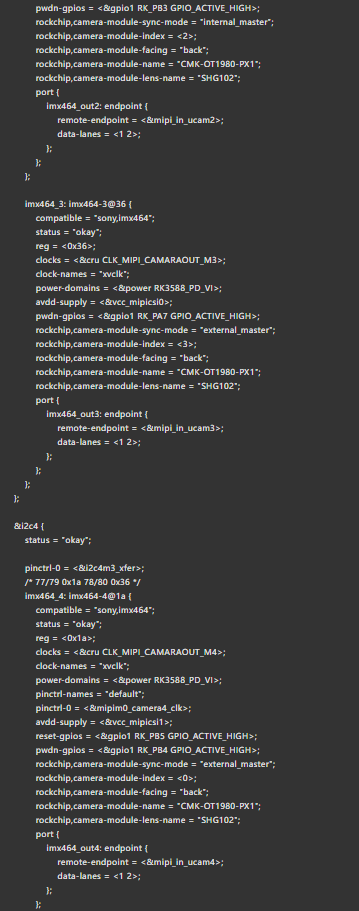
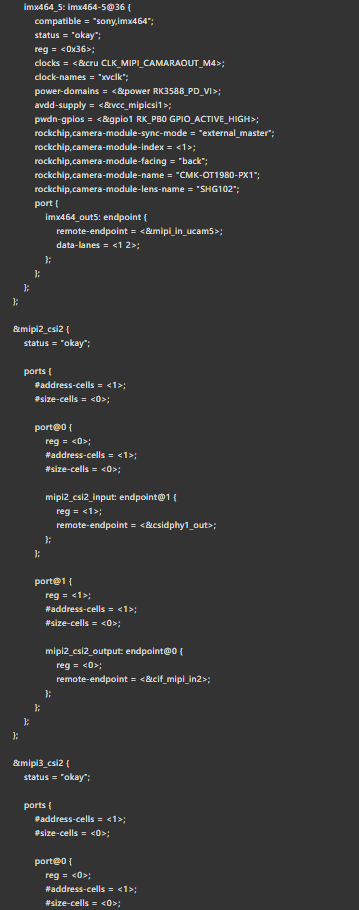
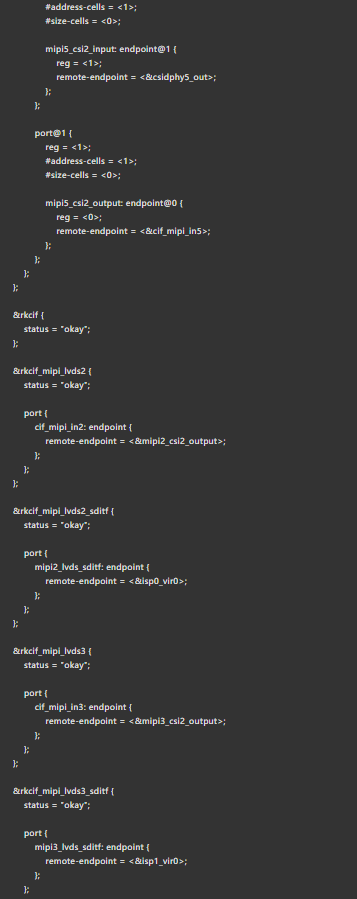
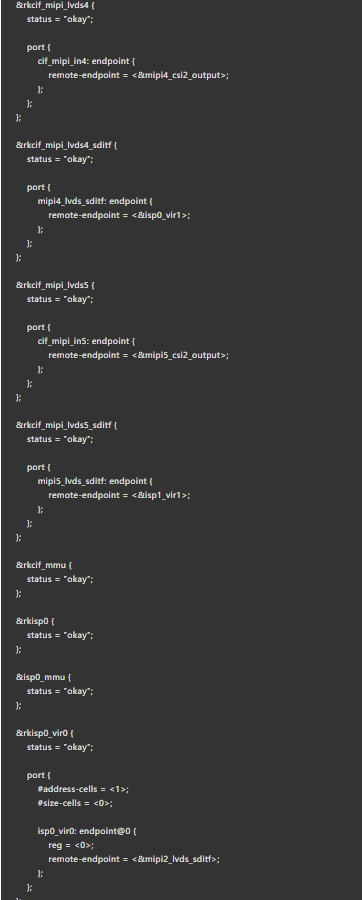
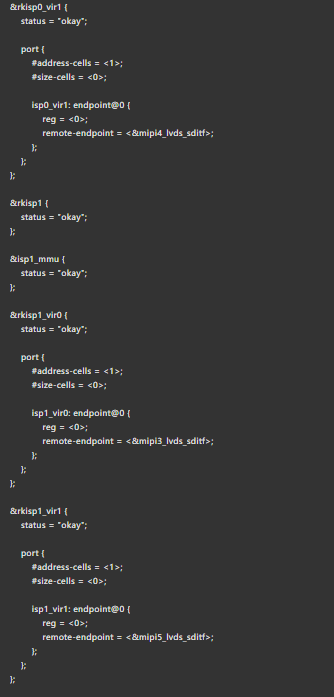
链路配置:
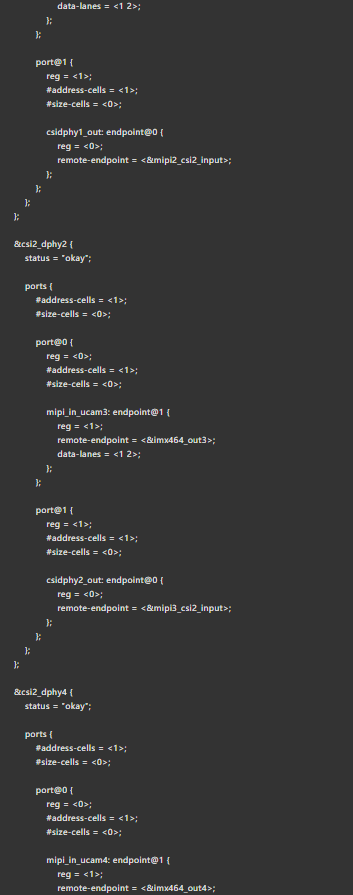
imx464 _1—> csi2_dphy1 —> mipi2_csi2 —> rkcif_mipi_lvds2—>rkcif_mipi_lvds2_sditf —>rkisp0_vir0 imx464 _2—> csi2_dphy2 —> mipi3_csi2 —> rkcif_mipi_lvds3—>rkcif_mipi_lvds3_sditf —>rkisp0_vir1 imx464 _3—> csi2_dphy4 —> mipi4_csi2 —> rkcif_mipi_lvds4—>rkcif_mipi_lvds4_sditf —>rkisp1_vir0 imx464 _4—> csi2_dphy5 —> mipi5_csi2 —> rkcif_mipi_lvds5—>rkcif_mipi_lvds5_sditf —>rkisp1_vir0
这里配置四个同一型号的摄像头,如果是有其他类型的摄像头需要添加,更新、替换相应的sensor驱动。
五. 结语这里借用ArmSoM-W3开发板上的imx415模组介绍在rockchip平台关于camera的部分配置 ,在开发和配置摄像头驱动时,每个具体型号的摄像头可能有其独特的设置和要求。如果你对其他型号的摄像头或其他嵌入式系统组件有疑问,或者需要更多定制的帮助,可以在ArmSom论坛提出问题,与其他开发者分享经验和获取支持。